Parallel Driving/Transportation
Parallel driving/transportation is proposed under a cloud-based cyber-physical-social systems, which can include parallel testing, parallel learning, and many other modules.
Learn more

2020 IEEE Intelligent Vehicles (IV) Symposium Workshop
Took place on Friday, Oct. 30 @ Zoom Live Session
The recent development of the Internet of Things (IoT) brings forward numerous novel technologies whose application scenarios are not only limited to the user level (e.g., individual consumer or private company), but can also be applied to the system level (e.g., commercial or industrial sector). For example, the IoT plays a significant role in the current Intelligent Transportation System (ITS), which is a system consists of vehicular communications, cloud computing, intelligent control, massive data management, and many other elements. By leveraging the IoT, different entities (e.g., vehicles, drivers, riders, infrastructures, traffic management centers, etc) in the existing transportation system get connected with each other, thus making the entire system smarter.
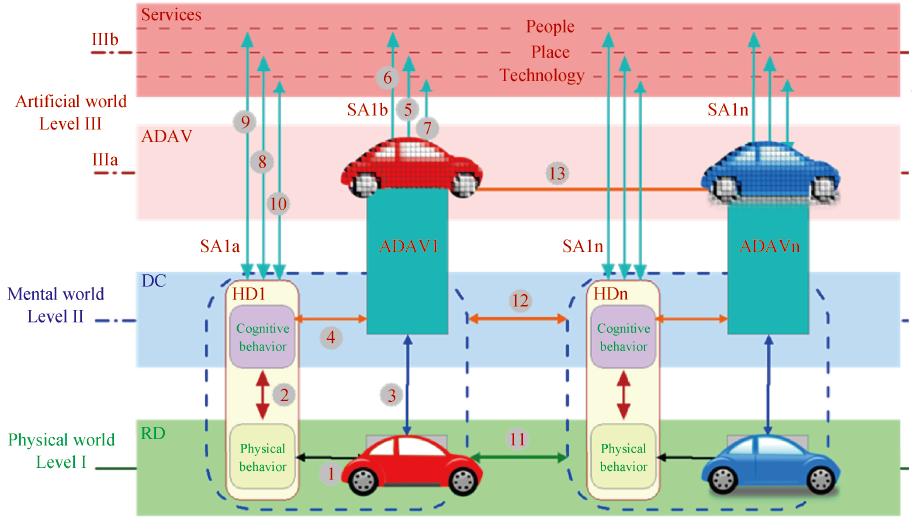
A rising and ubiquitous trend in this IoT context is represented by “digital twin”, where a real-time update of big data from the physical world’s entities is required to update the corresponding digital replicas in the cyber world. As an extension concept to digital twin, “parallel driving” also considers the mental world besides the physical world and the cyber world, which models the cognitive behaviors of human drivers, with the ability of enabling learning and interaction between the physical and cyber drivers. Both the computing architecture and the communication networks/protocols within the framework of digital twin or parallel driving are built to achieve higher efficiency, fidelity, and reliability.
However, along these developments come a few challenges for authorities, industry, as well as scientific communities. In terms of system design and control, current IoT applications in ITS need to be refined or even redesigned to better function under uncertainties in demand, and to better cooperate with existing conventional vehicles and infrastructures. From the performance assessment perspective, models and simulation tools based on artificial intelligence and big data have been widely developed to verify the performance of IoT applications, in particular taking into account the increasing trends in vehicle connectivity and automation. However, the validity of these models needs to be re-examined with field implementations.
This workshop focuses on sharing the state-of-the-art design, models, algorithms, simulation, and field implementation of a wide range of IoT applications in ITS (such as digital twin and parallel driving), and identifies challenges as well as research needs, aiming to encourage cross-disciplinary cooperation.
Parallel driving/transportation is proposed under a cloud-based cyber-physical-social systems, which can include parallel testing, parallel learning, and many other modules.
Learn more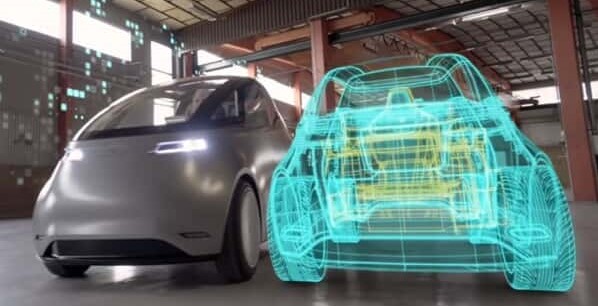
A digital twin is a digital replica of a living or non-living physical entity, whose technology can be adopted to build a vehicle-to-cloud framework.
Learn more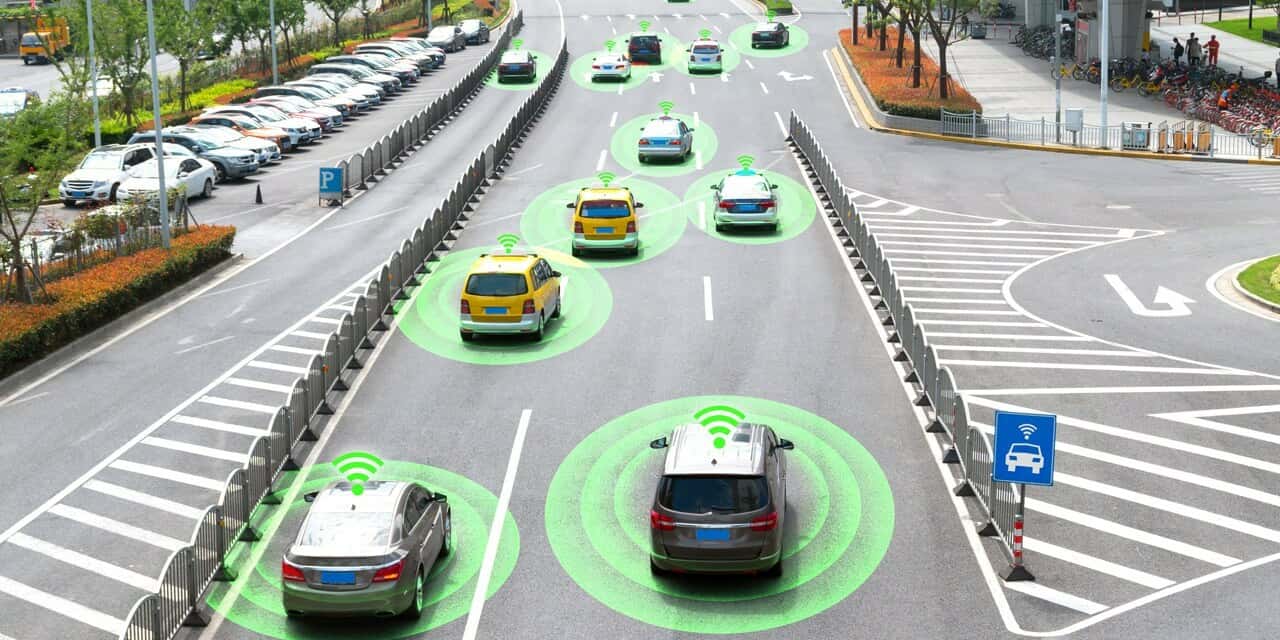
VCPS realizes mobile cloud computing services where vehicles themselves or mobile devices (e.g., smartphones and tablets of drivers or passengers in vehicles) play a role of both cloud server and cloud client.
Learn more
AI and big data empowers our cities to be smart to handle more challenging tasks in a more efficient manner.
Learn more
Remote driving enables human operators to take over control of autonomous vehicles at any time, and also reduces the risk of rescue missions.
Learn more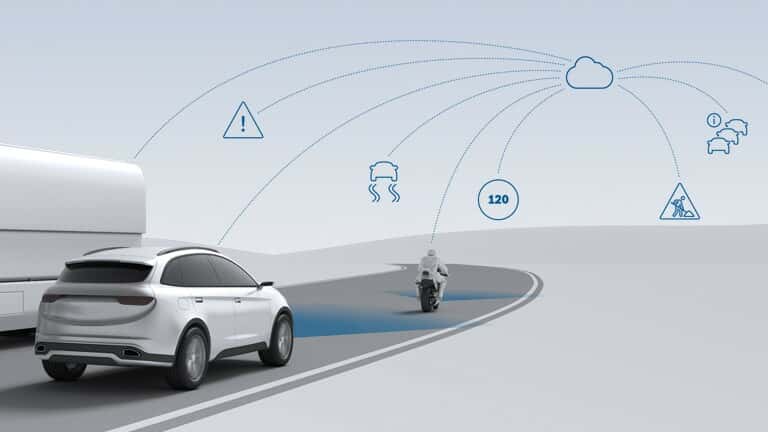
Along with the development of vehicle-to-cloud communication, more advanced IoT applications can be implemented in transportation systems.
Learn more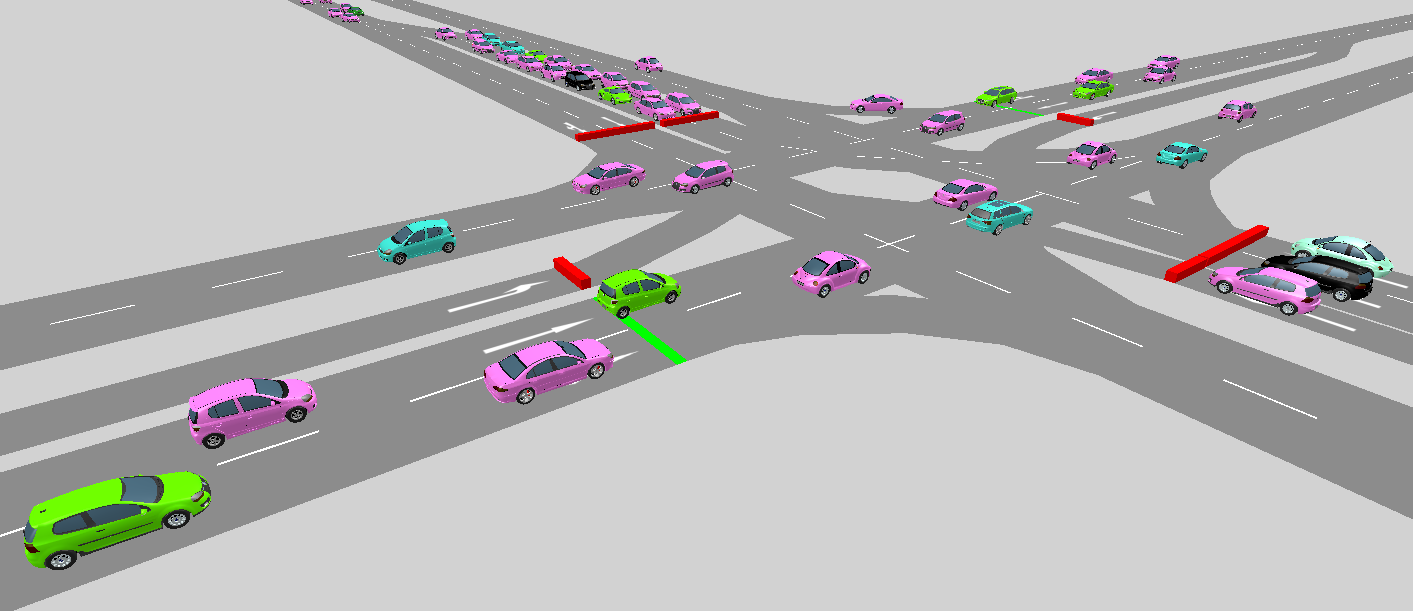
Before the implementation of the IoT applications in real world, modeling and simulation can be conducted to study their effectiveness.
Learn more
Field implementation of IoT applications can be conducted on real-world vehicles and make them internet of vehicles.
Learn more
Dr. Kanok Boriboonsomsin is a Research Engineer in the College of Engineering – Center for Environmental Research and Technology (CE-CERT) at University of California, Riverside, where he leads the Sustainable Freight Transportation research program. He has over 20 years of research and development experience in the areas of sustainable transportation, vehicle energy and emissions modeling, vehicle routing and navigation, connected and automated vehicles, intelligent transportation systems, traffic operations, and traffic simulation. Dr. Boriboonsomsin currently serves as a Vice Chair of the Measurement and Modeling Subcommittee under the Air Quality and Greenhouse Gas Mitigation Committee of the Transportation Research Board (TRB). He is a member of TRB, ITE, IEEE, ITSCA, and SAE International.
Learn more
Mr. Ke is a Ph.D. candidate in Intelligent Transportation Systems (2020 expected) and the manager of the Smart Transportation Applications and Research (STAR) Lab at the University of Washington. He received his B.E. degree in Automation at Tsinghua University (2014), and his M.S. degree in Civil Engineering at the University of Washington (2016). His research has contributed to the fields of smart mobility, traffic sensing technology, automated vehicles, artificial intelligence in transportation, and the Internet of Things. He is a member of the Statewide and National Data and Information Management Committee of TRB and a Young Member of the Infrastructure Systems Committee of ASCE T&DI. He also served as the Chair of Student Affairs at COTA from 2016 to 2020. Recently, Mr. Ke received the 2019 Michael Kyte Outstanding Student of the Year Award presented by the USDOT Region 10 University Transportation Center.
Learn more
Mr. Liu is currently a Ph.D. student in CRSS (Center for Robust Speech Systems) – UTDrive Lab at The University of Texas at Dallas. He was a visiting student in Behavior Signal Processing Laboratory at Nagoya University, Nagoya, Japan. He was also a research intern at Toyota Motor North America R&D - InfoTech Labs during 2020 spring. Mr. Liu's research interests include driver behavior analysis and intelligent vehicle advancement.
Learn more
Dr. Sanyal directs the activities of the Computational Urban Sciences group at the Oak Ridge National Laboratory. He brings a unique blend of computer science with applications in geosciences, technical, institutional, and strategic leadership with a track record of technology development, commercialization, and national recognition. His work falls at the intersection of high performance computing leaning towards the exascale, extreme scale data and analytics, simulation and modeling, visualization, scalable machine learning, and sensors and controls building both research and operational systems. Dr. Sanyal holds a PhD in Computer Science from Mississippi State University. He is a member of ACM, AGU, and IBPSA. He is an IEEE Senior Member. In 2017, he was named one of Knoxville's 40 under 40.
Learn more
Chris Schwarz received the B.S. degree from the University of Illinois at Urbana-Champaign in 1990 and the Ph.D. degree from the University of Iowa in 1998, both in electrical and computer engineering. From 1998 to present day, he has been a research engineer at the National Advanced Driving Simulator at the University of Iowa and is currently the Director of Engineering & Modeling Research. His research has involved all types of advanced driver assistance systems, connected vehicles, warning systems, automated vehicles, and driver impairment modeling. Dr. Schwarz’ current research interests include vehicle automation and distributed simulation. Dr. Schwarz is a member of SAE and a senior member of IEEE. He serves on the SAE on-road autonomous driving (ORAD) simulation task force as well as the TRB committee on vehicle-highway automation.
Learn more
Dr. Prashant Tiwari is GM & Executive Director of Intelligent Connected Systems (ICS) Division at Toyota InfoTech Labs, Mountain View, CA. Dr. Tiwari’s Division is responsible for performing applied research for future connected technologies with focus on car-to-car, car-to-edge and car-to-cloud connectivity on an end-to-end basis and building Toyota’s next generation mobility service platform and edge computing capability. Dr. Tiwari holds MBA from University of Chicago Booth School of Business, PhD from Rensselaer Polytechnic Institute and Masters from Indian Institute of Technology, Delhi. Dr. Tiwari has published several papers and filed several patents and also very active in Automotive Edge Computing Consortium (AECC) and SAE. Prior to joining Toyota, Dr. Tiwari held several leadership positions of increasing responsibilities at GE & UTC. In his last role with GE, Dr. Tiwari served as Senior Director at GE Aviation Digital. Prior to joining Toyota, Dr. Tiwari held Executive position and led the Embedded Systems & Integrated Project Teams for UTC Aerospace Systems.
Learn more
Daniel Work is an associate professor in the Department of Civil and Environmental Engineering, the Department of Electrical Engineering and Computer Science, and the Institute for Software Integrated Systems at Vanderbilt University. Prior to joining the faculty at Vanderbilt, Prof. Work was an associate professor in the Department of Civil and Environmental Engineering (tenured), the Department of Electrical and Computer Engineering (courtesy), and the Coordinated Science Laboratory at the University of Illinois at Urbana-Champaign. Prof. Work earned his bachelor of science degree (2006) from the Ohio State University, and a master of science (2007) and Ph.D. (2010) from the University of California, Berkeley, each in civil engineering. Prior to joining the faculty at Illinois as an assistant professor in 2010, Work was a research intern at Nokia Research Center, Palo Alto from 2008-2009, and a guest researcher at Microsoft Research Redmond in 2010. Prof. Work has research interests in transportation cyber physical systems and transportation data analytics.
Learn more
Dr. Zheng is a postdoctoral scholar in SEAS and CGBC at Harvard University working with Prof. Na Li and Prof. Ali Malkawi. He received the B.S. and M.E. degrees in Department of Automotive Engineering from Tsinghua University, Beijing, China, in 2013 and 2015. In Feb. 2019, he received the DPhil (Ph.D.) degree in Control from the University of Oxford for his work on Chordal Sparsity in Control and Optimization of Large-scale Systems under the supervision of Professor Antonis Papachristodoulou. Dr. Zheng is broadly interested in learning, optimization, and control of network systems, and their applications to autonomous vehicles and traffic systems. Dr. Zheng will be joining the Department of Electrical and Computer Engineering at UC San Diego as an Assistant Professor in July 2021.
Learn moreFollowing talks will be given within the 4-hour workshop session on Friday Oct. 30, 2020
The following agenda is a draft version, which will be finalized once all invited speakers are confirmed.
8:00-8:30 a.m. PDT Yongkang Liu
Sensor Fusion of Camera and Cloud Digital Twin Information for Intelligent Vehicles
With the rapid development of intelligent vehicles
and Advanced Driving Assistance Systems (ADAS), a mixed
level of human driver engagements is involved in the
transportation system. Visual guidance for drivers is essential
under this situation to prevent potential risks. To advance the
development of visual guidance systems, we introduce a novel
sensor fusion methodology, integrating camera image and
Digital Twin knowledge from the cloud. Target vehicle bounding
box is drawn and matched by combining results of object
detector running on ego vehicle and position information from
the cloud. The best matching result, with a 79.2% accuracy
under 0.7 Intersection over Union (IoU) threshold, is obtained
with depth image served as an additional feature source. Game
engine-based simulation results also reveal that the visual
guidance system could improve driving safety significantly
cooperate with the cloud Digital Twin system.
8:30-9:00 a.m. PDT Chris Schwarz
Digital Twins: From Macro to Micro
Simulation is now an integral part of automated vehicle testing programs, and many more miles are simulated than are
driven on the road. High fidelity digital twins are required for accurate simulations, and rely in turn on large amounts
of data collected from the real world, in the form of HD maps and sensor data. While simulation-based AV testing has been
used to massive effect for testing edge cases and large numbers of miles, it will be necessary for future simulations to
be even more realistic. They will have to enable AV simulations in different seasons of the year and under different
weather conditions (beyond current capabilities). They will have to include increasingly rural environments where lane
markings and surface conditions are poor. This will motivate the use of high-fidelity vehicle dynamics models that offer
realistic performance in extreme operating regimes. Sensor models and their validation will need to become more specific,
narrowing in on different brands and specifications. We summarize three studies at the National Advanced Driving Simulator,
both simulation and on-road. Based on this research, we discuss the benefits of a high-fidelity digital twin and its
application to the three study areas. While we begin with the more-common macro applications that involve many miles
and/or many vehicles, we end with the micro. There is much benefit to be gained from studying the interactions of one
driver with one vehicle, or between one AV and a vulnerable road user, in a realistic simulation environment
9:00-9:30 a.m. PDT Ruimin Ke
Design and Field Implementation of IoT Systems with Real-Time Traffic Video Analytics
Video analytics is driving a wide range of smart mobility applications with great potential to benefit transportation and infrastructure systems.
Most applications, e.g., traffic surveillance and autonomous driving, require not only high intelligence but also real-time operation.
However, real-time video analytics is considered the “killer app” for the Internet of Things (IoT) and often bottlenecked by the large
amounts of video data, high computational cost, and limited network bandwidth. In this talk, I will introduce the challenges and advances
in real-time traffic video analytics and their applications in transportation IoT. Specifically, I will talk about our recent work on the
design and field implementation of such IoT systems for smart infrastructure and automated vehicle testing.
9:30-10:00 a.m. PDT Yang Zheng
Integrating Autonomy into Traffic Systems: Scalable Control and Optimization
Traffic systems are undergoing a fundamental transformation. The emergence of connected and autonomous vehicles (CAVs)
provides tremendous opportunities for sustainability, efficiency, and safety. Before 100% CAVs are introduced in traffic
systems, there will be a long transition period of mixed mobility, where both human-driven vehicles and CAVs co-exist.
Timely and important questions are: can a small number of CAVs benefit urban mobility, and, if so, how? Moreover, the
design and operation of CAVs in traffic systems are becoming increasingly complex, due to system size, connectivity,
and heterogeneity. This talk presents contributions in distributed control and scalable optimization techniques, which
are critical for integrating autonomous vehicles into the existing traffic systems. In particular, I will provide
theoretical evidence of the high potential of CAVs in mixed mobility, and I will further show how to exploit sparsity
structures to design scalable and distributed algorithms that allow operating CAVs in large-scale mixed traffic systems.
10:00-10:30 a.m. PDT Prashant Tiwari
IoT and Smart Connected Vehicles Enabling MaaS Opportunities
The transportation industry currently is undergoing a huge transformation – estimated by some to be the biggest
transformation in its history – driven by Mobility as a Service (MaaS) opportunities and IoT revolution.
Vehicles increasingly are being equipped with embedded connectivity. By 2025, the Automotive Edge Computing
Consortium predicts that the connected car market will be worth $150 Billion, with 100 million connected
vehicles on the road. Analysts indicate that connected car capabilities already influence 6 out of 10 vehicle
purchases, giving vehicle manufacturers the ability to open new revenue streams, diversify core activities,
and improve profit margins by selling software and connected services. Smart vehicles are increasing becoming
most important verticals in IoT platform and processing the data from connected vehicles is one of the big
challenges all automakers are currently facing. But these challenges also provide opportunities to build hyper
connected cyber-physical systems (also called Digital Twin) with several interesting use cases like personalized
intelligent driving and smart traffic management.
10:30-11:00 a.m. PDT Daniel Work
Traffic Flow Smoothing at Scale
This talk will discuss modeling, simulation, and field demonstration advancements that are needed to control automated
vehicles to stabilize traffic flow at scale. Prior work on a closed course established that automated vehicles can
eliminate human-generated phantom traffic jams that seemingly occur without cause, reducing fuel consumption by up
to 40%. The talk will describe the research challenges and progress towards demonstrating traffic flow smoothing with
a fleet of connected and autonomous vehicles on the I-24 Smart Corridor in Tennessee, as part of the CIRCLES Consortium.
11:00-11:30 a.m. PDT Kanok Boriboonsomsin
Field Implementation of IoV Application for Improving Energy Efficiency of Heavy-Duty Vehicles
In recent years, the emergence of the Internet of Vehicles (IoV) technology has inspired numerous applications targeted
at improving existing transportation systems. As one of the widely studied applications of IoV technology, connected
eco-driving utilizes Signal Phase and Timing (SPaT) information from the upcoming traffic signal to design speed profile
for the connected vehicle to pass through the signalized intersection in an energy-efficient manner. To date, the majority
of connected eco-driving studies have been conducted through numerical or traffic simulations. Few studies have implemented
the application on real vehicles, and even fewer have been focused on heavy-duty trucks. In this presentation, the field
implementation of a connected eco-driving system for heavy-duty trucks that is enabled by cellular communications will be
described. Results and lessons learned from field trials of the system along two major freight corridors in the City of Carson,
California, will also be discussed.
11:30-12:00 noon PDT Jibonananda Sanyal
CTwin – The Chattanooga Mobility Digital Twin – Heralding the Next Generation in Observability and Control
Congestion continues to be a significant contributor to energy inefficiency in the US. In 2017, highway congestion
wasted over 3.3 billion gallons of fuel and caused 8.8 billion hours of lost productivity. Trucks accounted for $20
billion (11%) of the cost representing 7% of traffic. The talk focuses on the development of the City of Chattanooga’s
Digital Twin, named CTwin, that has delivered a regional-scale, open, scalable, real-time situational awareness platform
that brings in 500+ primary data streams from 7 proprietary vendor systems across 3 institutions, in addition to 40+
distinct data layers to create a capability that is unique for the Vehicle Technologies Office. Metrics based on industry
standards (MAP-21, Automated Traffic Signal Performance Measures - ATSPM) have been formulated to compute energy usage
estimates, regional speed, volume, and fuel used, as well as derive travel time reliability and percent stops on red,
besides others. Advanced data science approaches on real-time feeds have produced novel and exceptionally well received
data visualizations. Further, data-driven discoveries have led to an implementation of a control approach that is starting
to yield significant energy savings for the city. Talk will focus on the research, the developed capabilities, and the
anticipated outcomes of this work.
 Ziran Wang, Research Scientist
Ziran Wang, Research Scientist Guoyuan Wu, Associate Research Engineer
Guoyuan Wu, Associate Research Engineer Lingxi Li, Associate Professor
Lingxi Li, Associate Professor Dongpu Cao, Associate Professor
Dongpu Cao, Associate Professor Li Li, Associate Professor
Li Li, Associate Professor